4.2 KiB
nOS-V model
The nOS-V library implements a user space runtime that can schedule tasks to run in multiple CPUs. The nOS-V library is instrumented to track the internal state of the runtime as well as emit information about the tasks that are running.
Task model
The nOS-V runtime is composed of tasks that can be scheduled to run in threads. Tasks can be paused and resumed, leaving the CPUs free to execute other tasks.
In nOS-V, parallel tasks can also be scheduled multiple times and the same task may run concurrently in several CPUs. To model this scenario, we introduce the concept of body, which maps to each execution of the same task, with a unique body id.

A normal task only has one body, while a parallel task (created with
TASK_FLAG_PARALLEL) can have more than one body. Each body holds the
execution state, and can transition to different execution states
following this state diagram:

Bodies begin in the Created state and transition to Running when they
begin the execution. Bodies that can be paused (created with the flag
BODY_FLAG_PAUSE can transition to the Paused state.
Additionally, bodies can run multiple times if they are created with the
BODY_FLAG_RESURRECT, and transition from Dead to Running. This
transition is required to model the tasks that implement the taskiter in
NODES, which will be submitted multiple times for execution reusing the
same task id and body id. Every time a body runs again, the iteration
number is increased.
Task type colors
In the Paraver timeline, the color assigned to each nOS-V task type is computed from the task type label using a hash function; the task type id doesn't affect in any way how the color gets assigned. This method provides two desirable properties:
-
Invariant type colors over time: the order in which task types are created doesn't affect their color.
-
Deterministic colors among threads: task types with the same label end up mapped to the same color, even if they are from different threads located in different nodes.
For more details, see this MR.
Subsystem view
The subsystem view provides a simplified view on what is the nOS-V runtime doing over time. The view follows the same rules described in the subsystem view of Nanos6.
Idle view
The idle view shows the progress state of the running threads: Progressing and Resting. The Progressing state is shown when they are making useful progress and the Resting state when they are waiting for work. When workers start running, by definition, they begin in the Progressing state and there are some situations that make them transition to Resting:
- When workers are waiting in the delegation lock after some spins or when instructed to go to sleep.
- When the server is trying to serve tasks, but there are no more tasks available.
They will go back to Progressing as soon as they receive work. The
specific points at which they do so can be read in nOS-V source
code by looking at the
instr_worker_resting() and instr_worker_progressing() trace points.
This view is intended to detect parts of the execution time on which the workers don't have work, typically because the application doesn't have enough parallelism or the scheduler is unable to serve work fast enough.
Breakdown view
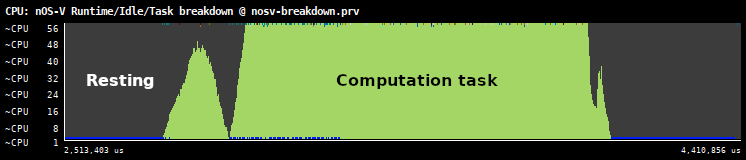
The breakdown view displays a summary of what is happening in all CPUs by mixing in a single timeline the subsystem, idle and task type views. Specifically, it shows how many CPUs are resting as defined by the idle view, how many are inside a given task by showing the task type label, and how many are in a particular subsystem of the runtime.
!!! Important
You must specify *ovni.level = 3* or higher in *nosv.toml* and pass
the *-b* option to ovniemu to generate the breakdown view.
Notice that the vertical axis shows the number of CPUs in that state, not the physical CPUs like other views. Here is an example of the Heat mini-app: