9.5 KiB
OpenMP model
The OpenMP programming model is a widely used API and set of directives for parallel programming, allowing developers to write multi-threaded and multi-process applications more easily. In this document we refer to the version 5.2 of the OpenMP specification.
The LLVM OpenMP Runtime provides an implementation of the OpenMP specification as a component of the LLVM compiler infrastructure. We have modified the LLVM OpenMP runtime to run on top of the nOS-V runtime as part of the OmpSs-2 LLVM compiler, named OpenMP-V.
We have added instrumentation events to OpenMP-V designed to be enabled along the nOS-V instrumentation. This document describes all the instrumentation features included in our modified OpenMP-V runtime to identify what is happening. This data is useful for both users and developers of the OpenMP runtime to analyze issues and undesired behaviors.
!!! Note
Instrumenting the original OpenMP runtime from the LLVM project is planned
but is not yet posible. For now you must use the modified OpenMP-V runtime
with nOS-V.
Enable the instrumentation
To generate runtime traces, you will have to:
- Build nOS-V with ovni support: Refer to the
nOS-V
documentation.
Typically you should use the
--with-ovnioption at configure time to specify where ovni is installed. - Build OpenMP-V with ovni and nOS-V support: Use the
PKG_CONFIG_PATHenvironment variable to specify the nOS-V and ovni installation when configuring CMake. - Enable the instrumentation in nOS-V at runtime: Refer to the
nOS-V documentation
to find out how to enable the tracing at runtime. Typically you can just set
NOSV_CONFIG_OVERRIDE="instrumentation.version=ovni". - Enable the instrumentation of OpenMP-V at runtime: Set the environment
variable
OMP_OVNI=1.
Currently there is only support for the subsystem view, which is documented below. The view is complemented with the information of nOS-V views, as OpenMP-V uses nOS-V tasks to run the workers.
Subsystem view
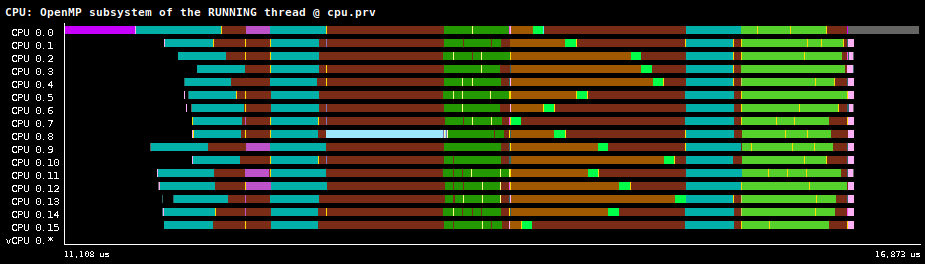
This view illustrates the activities of each thread with different states:
-
Work-distribution subsystem: Related to work-distribution constructs, in Chapter 11.
-
Distribute: Running a Distribute region.
-
Dynamic for chunk: Running a chunk of a dynamic for, which often involve running more than one iteration of the loop. See the limitations below.
-
Dynamic for initialization: Preparing a dynamic for.
-
Static for chunk: Executing the assigned iterations of an static for.
-
Single: Running a Single region. All threads of the parallel region participate.
-
Section: Running a Section region. All threads of the parallel region participate.
-
-
Task subsystem: Related to tasking constructs, in Chapter 12.
-
Allocation: Allocating the task descriptor.
-
Check deps: Checking if the task has pending dependencies to be fulfilled. When all dependencies are fulfilled the task will be scheduled.
-
Duplicating: Duplicating the task descriptor in a taskloop.
-
Releasing deps: Releasing dependencies at the end of a task. This state is always present even if the task has no dependencies.
-
Running task: Executing a task.
-
Running task if0: Executing a task if0.
-
Scheduling: Adding the task to the scheduler for execution.
-
Taskgroup: Waiting in a taskgroup construct.
-
Taskwait: Waiting in a taskwait construct.
-
Taskwait deps: Trying to execute tasks until dependencies have been fulfilled. This appears typically in a task if0 with dependencies or a taskwait with deps.
-
Taskyield: Performing a taskyield construct.
-
-
Critical subsystem: Related to the critical Constuct, in Section 15.2.
-
Acquiring: Waiting to acquire a Critical section.
-
Section: Running the Critical section.
-
Releasing: Waiting to release a Critical section.
-
-
Barrier subsystem: Related to barriers, in Section 15.3. All barriers can try to execute tasks.
-
Barrier: Fork: Workers wait for a release signal from the master thread to continue. The master can continue as soon as it signals the workers. It is done at the beginning of a fork-join region.
-
Barrier: Join: The master thread waits until all workers finish their work. Workers can continue as soon as they signal the master. It is done at the end of a fork-join region.
-
Barrier: Plain: Performing a plain barrier, which waits for a release signal from the master thread to continue. It is done at the beginning of a fork-join region, in the
__kmp_join_barrier()function. -
Barrier: Task: Blocked in an additional tasking barrier until all previous tasks have been executed. Only happens when executed with
KMP_TASKING=1.
-
-
Runtime subsystem: Internal operations of the runtime.
-
Attached: Present after the call to
nosv_attach()and beforenosv_detach(). This state is a hack. -
Fork call: Preparing a parallel section using the fork-join model. Only called from the master thread.
-
Init: Initializing the OpenMP-V runtime.
-
Internal microtask: Running a internal OpenMP-V function as a microtask.
-
User microtask: Running user code as a microtask in a worker thread.
-
Worker main Loop: Running the main loop, where the workers run the fork barrier, run a microtask and perform a join barrier until there is no more work.
-
!!! Note
The generated HTML version of the OpenMP 5.2 specification has some parts
missing, so we link directly to the PDF file which may not work in some
browsers.
Limitations
As the compiler generates the code that perform the calls to the OpenMP-V runtime, there are some parts of the execution that are complicated to instrument by just placing a pair of events to delimite a function.
For those cases we use an approximation which is documented in the following subsections.
Dynamic for
The generated code of a dynamic for has the following structure:
__kmpc_dispatch_init_4(...);
while (__kmpc_dispatch_next_4(...)) {
for (i = ...; i <= ...; i++) {
// User code ...
}
}
The function __kmpc_dispatch_next_4() returns true if there are more
chunks (group of iterations) to be executed by the thread, otherwise it returns
false.
Ideally we want to instrument each chunk with a pair of begin and end events.
The problem with the instrumentation is that there is no easy way of determining
if the call to __kmpc_dispatch_next_4() is processing the first chunk, just
after __kmpc_dispatch_init_4(), or is coming from other chunks due to the
while loop.
Therefore, from the __kmpc_dispatch_next_4() alone, we cannot determine if we
need to only emit a single "begin a new chunk" event or we need to emit the pair
of events "finish the last chunk" and "begin a new one".
So, as a workaround, we emit an event from the end of __kmpc_dispatch_init_4()
starting a new chunk (which is fake), and then from __kmpc_dispatch_next_4() we
always emit the "finish the last chunk" and "begin a new one" events (unless
there are no more chunks, in which case we don't emit the "begin a new one"
event).
This will cause an spurious Work-distribution: Dynamic for chunk state at the beginning of each dynamic for, which should be very short and is not really a chunk.
Static for
The generated code of an static for has the following structure:
__kmpc_for_static_init_4(...);
for (i = ...; i <= ...; i++) {
// User code ...
}
__kmpc_for_static_fini(...);
As this code is generated by the compiler we cannot easily add the begin/end pair of events to mark the Work-distribution: Static for chunk state.
We assume that by placing the "begin processing a chunk" event at the end of
__kmpc_for_static_init_4() and the "end processing the chunk" event at
the beginning of __kmpc_for_static_fini() is equivalent to adding the
events surrounding the for loop.
Task if0
The generated code of an if0 task has the following structure:
... = __kmpc_omp_task_alloc(...);
__kmpc_omp_taskwait_deps_51(...); // If task has dependencies
__kmpc_omp_task_begin_if0(...);
// Call to the user code
omp_task_entry_(...);
__kmpc_omp_task_complete_if0(...);
Instead of injecting the begin and end events in the user code, we
approximate it by placing the "begin if0 task" event at the end of the
__kmpc_omp_task_begin_if0 function and the "end if0 task" event at the
beginning of __kmpc_omp_task_complete_if0. This state will be shown as
Task: Running task if0.